
Разные Опыты в Домашних Условиях
 Привет Хабр! Я работаю RnD-художником в минском центре разработки Wargaming. А в свободное время даю волю своей инженерной фантазии. В этой статье я хочу поделиться своим опытом домашнего марсоходостроения.
Привет Хабр! Я работаю RnD-художником в минском центре разработки Wargaming. А в свободное время даю волю своей инженерной фантазии. В этой статье я хочу поделиться своим опытом домашнего марсоходостроения.
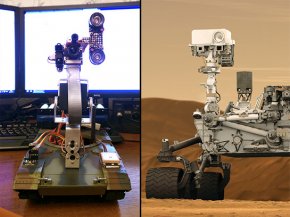
Началось все с того, что захотелось почувствовать, каково управлять марсоходом, находящимся за десятки световых минут. Доступа к настоящему роверу, конечно же, нет, поэтому построил свой. Главным условием, которое я был намерен соблюсти – симуляция временного лага в управлении. Усилий потрачено масса, но нужный результат был достигнут.
Не буду подробно останавливаться на своих изысканиях, а сразу опишу финальную конструкцию. Если будет интересно, почему я пришел к этим решениям и комплектующим (или сможете предложить варианты лучше), то милости прошу в комментарии.
Hardware
Перво-наперво была приобретена платформа — радиоуправляемый танк Abrams M1A2, содержимое которого (за исключением двигателей) было беспощадно выпотрошено: Далее, я приступил к поиску источника питания. К сожалению, Плутоний-238 для самодельного РИТЭГа найти не удалось, поэтому пришлось использовать альтернативный вариант. Достойной заменой стала батарея из 16 аккумуляторов NCR18650B (3400 мА) с контроллером заряда/разряда. Расчетная емкость — 27 А/ч при напряжении 7, 2 В:
Далее, я приступил к поиску источника питания. К сожалению, Плутоний-238 для самодельного РИТЭГа найти не удалось, поэтому пришлось использовать альтернативный вариант. Достойной заменой стала батарея из 16 аккумуляторов NCR18650B (3400 мА) с контроллером заряда/разряда. Расчетная емкость — 27 А/ч при напряжении 7, 2 В:
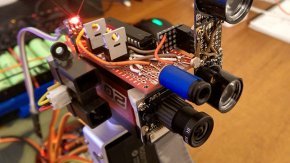
Подсветка потребляет достаточно много энергии, поэтому включается лишь во время съемки при уровне освещения ниже установленного порога. Также только на время замера включается и оптический дальномер. Включение и отключение происходит при помощи 40-амперных мосфетов (других ключей в запасе не нашлось), управляемых микроконтроллером Atmega328 с минимальной обвязкой. К этому же контроллеру подключен дальномер и фоторезистор. Для последнего я подобрал функцию аппроксимации под промышленный люксметр, взятый на работе (там мы его используем для валидации освещения). Также я использовал бесконтактный датчик температуры MLX90614. Вся эта обвязка была собрана на макетной плате и прикручена к серводвигателям вращения головы. К Raspberry головной модуль подключен всего четырьмя проводами — питание и шина I2C.
Для последнего я подобрал функцию аппроксимации под промышленный люксметр, взятый на работе (там мы его используем для валидации освещения). Также я использовал бесконтактный датчик температуры MLX90614. Вся эта обвязка была собрана на макетной плате и прикручена к серводвигателям вращения головы. К Raspberry головной модуль подключен всего четырьмя проводами — питание и шина I2C.
Для управления сервоприводами я использовал специализированный I2C-контроллер PCA9685 на 16 ШИМ выходов. Сначала попробовал Arduino, но библиотека для сервоприводов там реализована программно. Из-за этого возникали спонтанные рывки и подергивания во время работы контроллера с I2C. Как-то раз ровер даже начал молотить камерой о стол. После замены Arduino на PCA9685 все движения стали ровными и шелковистыми.